

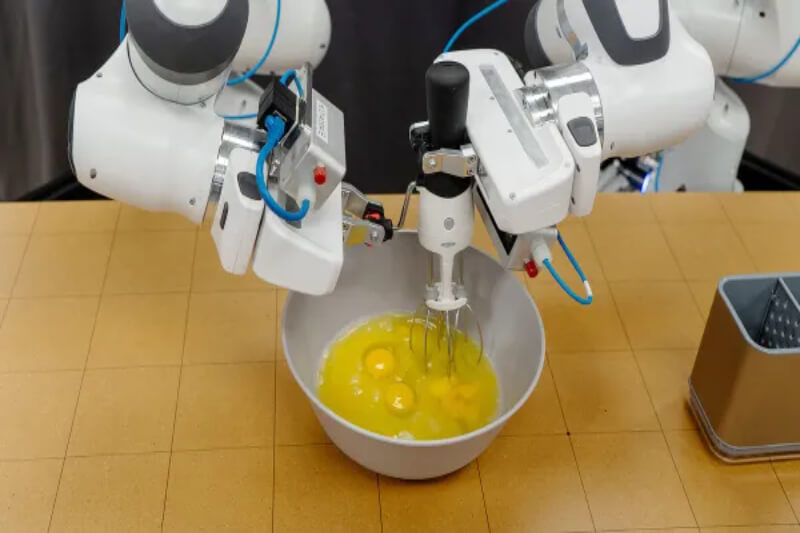
Toyota w swoim “przedszkolu dla robotów” uczy ich podstawowych czynności wykonywanych w kuchni. To m.in. roztrzepywanie jajek w misce czy obieranie warzyw. Toyota Research Institute twierdzi, że dzięki wykorzystaniu własnej metody szybkiego nauczania robotów, te opanowały już ponad 60 różnych umiejętności.
Roboty od Toyoty
Toyota wykorzystuje algorytmy do tego, aby uczyć roboty obierania warzyw, przygotowywania przekąsek i wykonywania innych zadań manualnych, które mogą przydać się w “prawdziwym świecie”. Miejsce, gdzie roboty uczą się tych czynności zostało nazwane “przedszkolem dla robotów”. Russ Tedrake, wiceprezes ds. badań nad robotyką w Toyota Research Institute (TRI) twierdzi, że ta metoda pozwala na nauczenie robotów określonych umiejętności przy znacznie mniejszej liczbie demonstracji niż kiedykolwiek wcześniej.
Roboty jako personalni asystenci
Świętym Graalem robotyki jest stworzenie robotów ogólnego przeznaczenia, które mogą wejść do naszych miejsc pracy lub domów i szybko nauczyć się wykonywać nowe zadania. Jednak aby to osiągnąć, będziemy potrzebować szybkiej i skutecznej metody szkolenia algorytmów napędzających roboty. Ta opracowana przez Toyotę może okazać się przełomowa.
Tedrake utrzymuje, że nawet rok temu nie spodziewałby się, że firma jest blisko osiągnięcia tego poziomu nauki. “Przełomowa” metoda uczenia robotów nowych umiejętności skupia się m.in. na precyzji przy wykonywaniu takich czynności jak nalewanie płynów czy posługiwanie się miękkimi przedmiotami. Toyota Research Institute twierdzi, że dzięki tej metodzie roboty umieją wykonywać już ponad 60 różnych umiejętności, w tym obsługują mikser ręczny, przewracają naleśniki i umieszczają naczynia na suszarce. Jak widać, są to zadania typowo związane z kuchnią. Celem TRI jest opracowanie 200 umiejętności do końca 2023 r. i 1 tys. do końca 2024 r.

Nauka robotów
Naukowiec, który jest operatorem robota, zazwyczaj wielokrotnie przeprowadza go przez nowe zadanie, co trwa godzinę lub dwie. W tym czasie demonstruje od kilkudziesięciu do kilkuset razy jak wykonać je perfekcyjnie, podczas gdy kamery robota i czujniki haptyczne rejestrują proces, aż w końcu robot się go nauczy.
„Nasza zwyczajowa procedura polega na tym, że uczymy robota po południu, pozwalamy mu powtarzać lekcje przez całą noc, a następnego ranka jest on w stanie wykonać kolejne, nowe zadanie”
powiedział Ben Burchfiel, kierownik działu Dexterous Manipulation w TDI.
Dane demonstracyjne są następnie wprowadzane do modelu sztucznej inteligencji, który uczy się poprzez „politykę rozpowszechniania”. To podejście opracowane przez TRI i badaczy z Uniwersytetu Columbia. Technika ta opiera się na metodzie stosowanej w niektórych systemach AI przetwarzających tekst na obraz, takich jak Stable Diffusion i DALL-E 2, ale zamiast generować obrazy z tekstu, ta wersja umożliwia sztucznej inteligencji generowanie fizycznych działań. Ta technika jest skomplikowana, ale znacznie szybsza niż inne metody szkoleniowe.
„Ta metoda ma ogromny potencjał w budowaniu tego, co nazywamy “modelami behawioralnymi na dużą skalę”. Tak jak wielkoskalowe modele językowe zrewolucjonizowały chatboty, tak te modele behawioralne umożliwiają robotom wykonywanie przydatnych zadań w sposób, w jaki wcześniej nie było to możliwe. Przewidujemy kolejny przełom w momencie, gdy roboty będą w stanie wykonywać nowe umiejętności, których wcześniej się nie uczyły.”
powiedział Russ Tedrake, wiceprezes ds. badań nad robotyką w Toyota Research Institute.
Ograniczenia
Ograniczeniem w metodzie nauki robotów opracowanej przez TRI jest to, że mogą one mieć trudności z wykonaniem zadań w warunkach innych niż “demonstracyjne”. Na przykład robot, który nie miał problemu z opróżnieniem kubka z lodem do czystego zlewu – takiego jak ten w danych demonstracyjnych – może mieć trudności z opróżnieniem go w momencie, gdy zlew jest zastawiony naczyniami.
Zdjęcie główne: Toyota Research Institute






{kind=link}